テレオペTele-operation遠端操作
RUF Cockpit · RUF Box
ADAWARP は、8 年間の遠隔操作の実績の全てを、フォークリフトの遠隔操作に注ぎ込みました。ADAWARP has poured eight years of remote-operation expertise into the tele-operation of forklifts.ADAWARP 將八年來累積的遠端操作實績,全數投入堆高機的遠端操作。

Remote controlled Unmanned Forklift for Physical AI
人類の テレオペによる フィジカル AI のためのフォークリフト
Physical AI of the forklift by the tele-operation, for the people
由人類遠端操作 為實體 AI 而生的 堆高機
Concept
テレオペ×フォークリフト×データ収集×デジタルツイン×モデル学習
Tele-operation×Forklift×Data Collection×Digital Twin×Imitation Learning
遠端操作×堆高機×資料採集×數位分身×模仿學習
RUF Cockpit · RUF Box
ADAWARP は、8 年間の遠隔操作の実績の全てを、フォークリフトの遠隔操作に注ぎ込みました。ADAWARP has poured eight years of remote-operation expertise into the tele-operation of forklifts.ADAWARP 將八年來累積的遠端操作實績,全數投入堆高機的遠端操作。
RUF Collector
ADAWARP は、物流倉庫会社の優秀なフォークリフトのオペレーターによる、現場作業のテレオペのデータを回収しています。ADAWARP collects tele-operation data from on-site work by skilled forklift operators at logistics warehouse companies.ADAWARP 蒐集物流倉庫公司中,優秀堆高機操作員於現場作業的遠端操作資料。
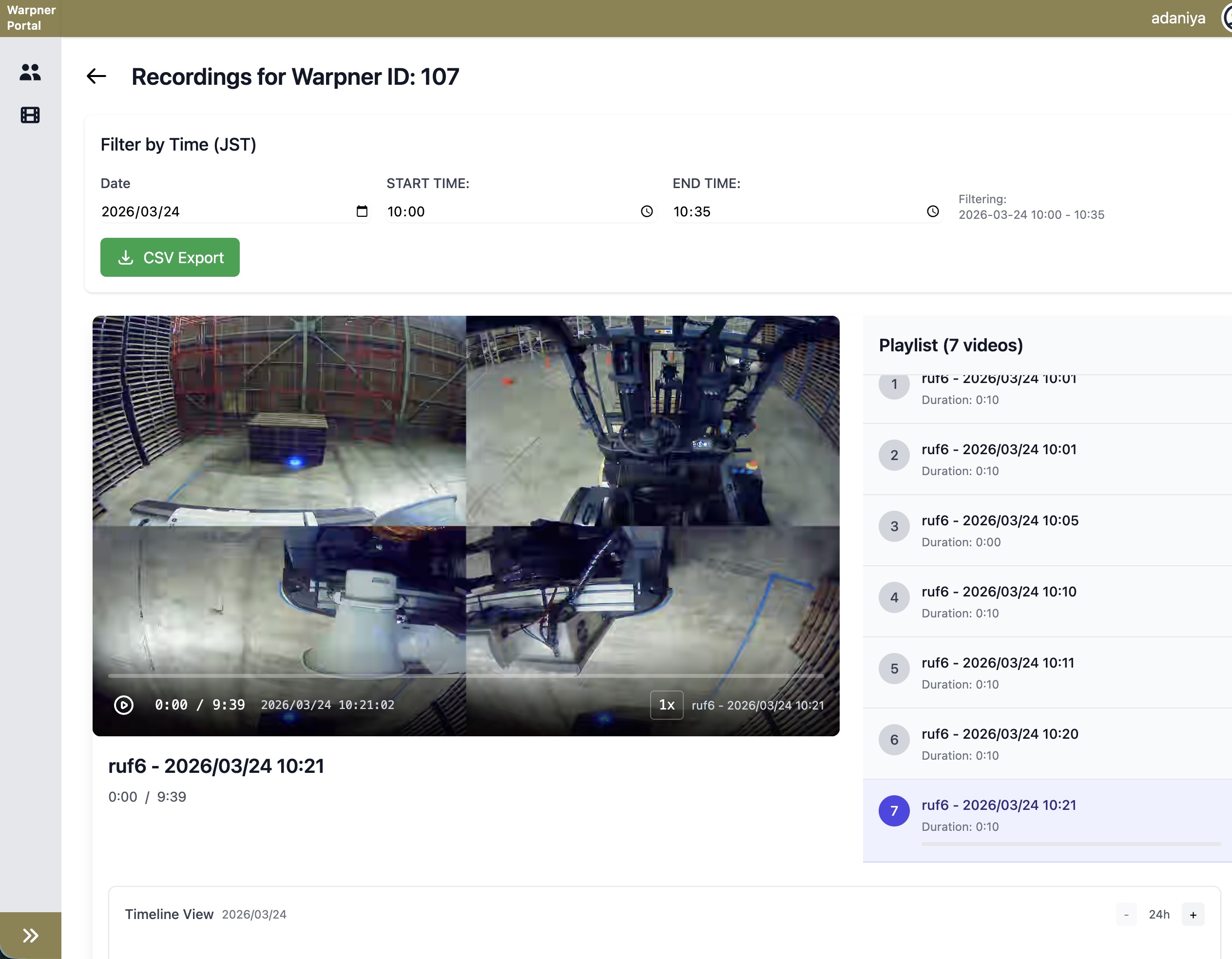
RUF Collector
Coming SoonADAWARP は、取得したデータのラベリングを行います。ADAWARP labels the collected data.ADAWARP 為蒐集到的資料進行標註。
Fo
Coming SoonADAWARP は、フォークリフトのモデル学習を行っています。ADAWARP performs model learning for forklifts.ADAWARP 正在進行堆高機的模型學習。
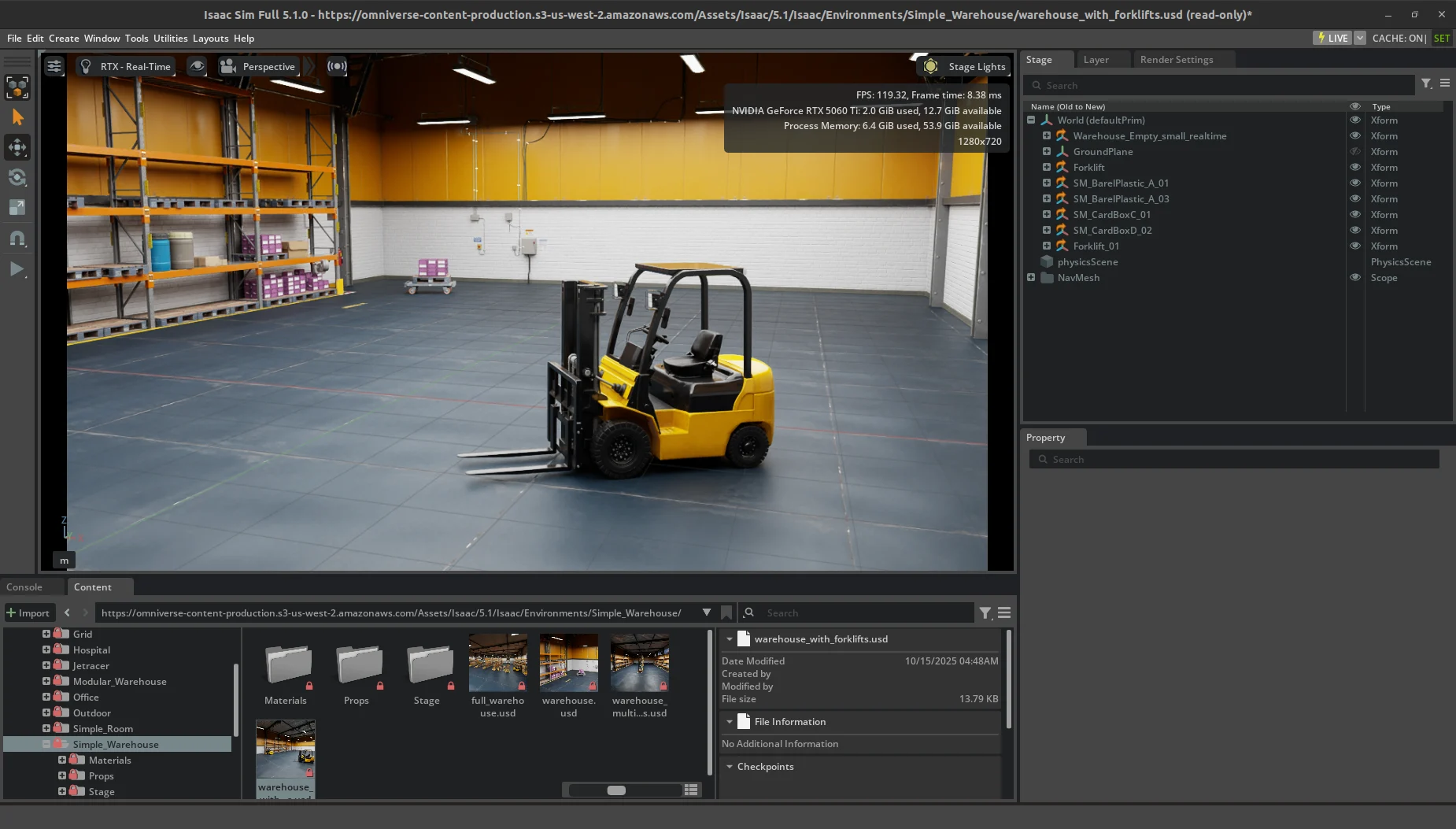
RUF Sim
ADAWARP は、Isaac Sim を用いたデジタルツインの環境を作成し、データ学習・評価に用います。ADAWARP builds digital-twin environments with Isaac Sim, used for data training and evaluation.ADAWARP 運用 Isaac Sim 建構數位分身環境,用於資料訓練與評估。
Products
RUF は、フォークリフトの物理 AI を成立させる 6 つのプロダクトのプラットフォームです。あなたの機体は、その対応機「RUF Ready Machine」になります。
RUF is a platform of six products that make forklift Physical AI work. Your machine becomes a certified "RUF Ready Machine."
RUF 是由 六項產品構成的平台,讓堆高機的實體 AI 得以成立。您的機體,將成為通過認證的「RUF Ready Machine」。
対応機体Compatible machine相容機體

車載ユニットOnboard unit車載單元

操縦席Cockpit駕駛艙
特許出願準備中Patent pending專利申請準備中
シミュレーターSimulator模擬器
データ基盤Data platform資料平台
フォークリフト基盤モデル ── 特設ページ →Forklift foundation model — dedicated page →堆高機基礎模型 ── 專頁 →
Coming SoonComing Soon即將推出
各プロダクトの詳細は、デモ・お打ち合わせにてご紹介します。 The details of each product are introduced at a demo or meeting. 各項產品的詳細內容,將於展示與洽談中為您介紹。
Movies
遠隔操作から Isaac Sim のデジタルツインまで、RUF が動いている様子を実際の映像でご覧ください。
See RUF in motion — from tele-operated forklifts to the Isaac Sim digital twin.
從遠端操作到 Isaac Sim 數位分身,透過實際影像觀看 RUF 的運作。
遠隔無人フォークリフト操作シーン Remote Unmanned Forklift in Operation 遠端無人堆高機操作場景
RUF — Remote Unmanned Forklift
Isaac Sim × Forklift
Tech
フィジカル AI を成立させる 4 つの技術スタック。テレオペで取り、自律で動かし、デジタルツインで育て、3DGS で世界を写す。
Four technology pillars that make physical AI work. Capture with tele-operation, act with autonomy, train in digital twin, see through 3DGS.
支撐實體 AI 的四項技術堆疊。以遠端操作擷取、以自主行駛行動、於數位分身中訓練、透過 3DGS 映照世界。
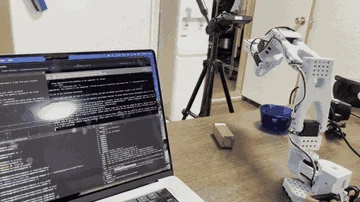
遠隔操作Tele-operation遠端操作
9 年間にわたる、フォークリフト・ショベルカー・タワークレーン・ロボットの遠隔操作実績。フィジカル AI のデータを生み出す入口。Nine years of remote operation across forklifts, excavators, tower cranes and robots. The entry point that produces the data for physical AI.9 年來累積堆高機、挖土機、塔式起重機與機器人的遠端操作實績。為實體 AI 產出資料的入口。
特許出願準備中Patent pending專利申請準備中自律走行Autonomous driving自主行駛
フォークリフトの自律走行。テレオペをフォールバックに、人 1 割・AI 9 割の運用を支える。完全自動ではなく「人を残す」設計思想。Autonomous forklift driving. Backed up by tele-operation, designed for 10% human / 90% AI operation. Not full automation — by design, the human remains.堆高機自主行駛。以遠端操作為備援,支援人 1 成・AI 9 成的運用。並非完全自動化,而是「保留人類」的設計思想。
RoadmapデジタルツインDigital twin數位分身
Isaac Sim をベースとしたシミュレーション環境。国土交通省プロジェクトで培われた、AI が現実の前に学ぶ場。Isaac Sim-based simulation environment. Cultivated through Japan's MLIT projects — the place where AI learns before reality.以 Isaac Sim 為基礎的模擬環境。透過日本國土交通省專案培育,AI 在現實之前學習的場域。
3D Gaussian Splatting3D Gaussian Splatting3D Gaussian Splatting
3D Gaussian Splatting による倉庫環境の写実的再構築。自律走行の「目」となり、デジタルツインを現実に接続する。Photorealistic warehouse reconstruction via 3D Gaussian Splatting. The "eyes" of autonomous drive, connecting the digital twin to reality.透過 3D Gaussian Splatting 對倉庫環境進行寫實重構。成為自主行駛的「眼睛」,將數位分身連結至現實。
In DevelopmentEngagement
RUF とは、4 つの形で始められます。まずは小さく、実証から。
Four ways to start with RUF — small first, beginning with a proof of concept.
與 RUF 合作有四種方式。先從小規模的實證開始。
RUF をレンタルでご利用いただけます。Use RUF on a rental basis.提供 RUF 的租賃服務。
RUF Collector で、御社の現場の操作・映像データを収集・実証します。With RUF Collector, we collect and validate operation & vision data at your site.透過 RUF Collector,於貴司現場蒐集並驗證操作與影像資料。
御社のフォークリフトを、RUF 対応機(RUF Ready Machine)にします。We make your forklift a RUF Ready Machine.將貴司的堆高機,升級為 RUF Ready Machine。
Fo ── フォークリフト基盤モデル。用途に合わせたモデル学習を提供します。Fo — our forklift foundation model. Model learning tailored to your use case.Fo ── 堆高機基礎模型。提供符合用途的模型學習。
Clients
News
RUF の実機・実倉庫の様子を、ご案内します。レンタル・データ実証・RUF Ready 化のご相談も、まずはこちらから。
We will show you RUF in action — at our real warehouses. For rental, a data PoC, or RUF Ready integration, please reach out below.
我們將為您介紹 RUF 的實機與實際倉庫的運作。租賃、資料實證、RUF Ready 化的諮詢,歡迎由此聯繫。